
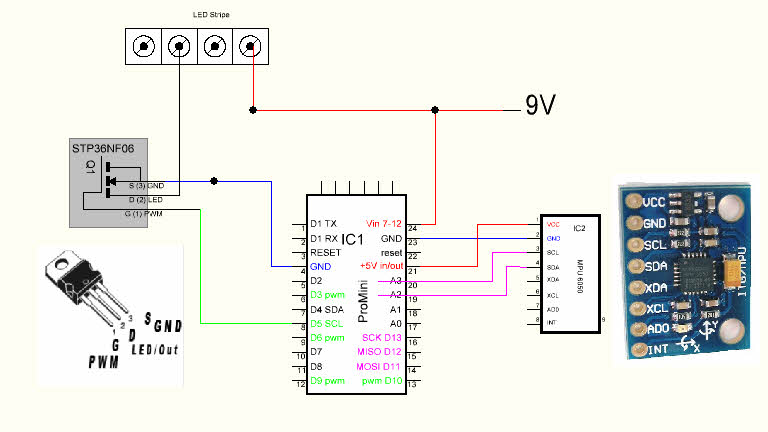
Einrad mit LED basierend auf arduino + MPU6050

Hier wird über ein arduino die Beschleunigung des Rades gemessen.
Abhängig hiervon wird die Beleuchtung geregelt.
[codesyntax lang=”c”]
//
// unicycle LED controller
// 2016-02-20 by Thomas Hoeser
// V0.1
// The output scale for any setting is [-32768, +32767] for each of the six axes.
// I2Cdev and MPU6050 must be installed as libraries, or else the .cpp/.h files
// for both classes must be in the include path of your project
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
MPU6050 accelgyro; // default I2C address is 0x68
int16_t ax, ay, az;
int16_t gx, gy, gz;
int agstatus = 0;
int brightness = 0;
int minBrightness = 5;
int maxAccLo = -32767; //sensor max 32767
int maxAccHi = 32767; //sensor max 32767
#define LED_PIN 13
#define LED2_PIN 5 // PWM
bool blinkState = false;
unsigned long refreshTimer, flashTimer, tempTimer;
void printDec(int decVal);
//---------------------------------------------------------------------------------------------------
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
// initialize serial communication
// (38400 chosen because it works as well at 8MHz as it does at 16MHz
Serial.begin(38400);
// initialize device
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
// verify connection
Serial.println("Testing device connections...");
agstatus = accelgyro.testConnection();
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
// configure Arduino LED for
pinMode( LED_PIN, OUTPUT);
pinMode(LED2_PIN, OUTPUT);
refreshTimer = flashTimer = millis();
} // end of setup()
//---------------------------------------------------------------------------------------------------
void loop() {
if(agstatus){
// read raw gyro measurements from device
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
if(abs(az)> 1000){ // if wheel is flat on the ground, switch LED off
analogWrite(LED2_PIN, 0); // PWM output
}
else {
// map(value, fromLow, fromHigh, toLow, toHigh)
brightness = abs(gz);
brightness = map (brightness,0,maxAccHi,0,255);//-32768, +32767
if (brightness < minBrightness) { // disregard jitter / noise
analogWrite(LED2_PIN, 0);
} else {
analogWrite(LED2_PIN, brightness); // PWM output
}
} // wheel not upright
// display tab-separated gyro x/y/z values
Serial.print("gyro raw:\t");
printDec(gx);Serial.print("\t");
printDec(gy);Serial.print("\t");
printDec(gz);Serial.print("\t");
printDec(brightness);Serial.print("\n");
// delay(100); // serial console might be overloaded - grant some delay
// blink LED to indicate activity
tempTimer = millis();
if (tempTimer - flashTimer < 750) {
digitalWrite(LED_PIN,0);
}
else if (tempTimer - flashTimer > 749) {
digitalWrite(LED_PIN,1);
} // tempTimer
if (tempTimer - flashTimer > 1024) {
flashTimer = millis(); // reset timer after 1 second(ish)
}
} // MPU6050 not available
} // end of loop()
//---------------------------------------------------------------------------------------------------
void printDec(int decVal){
String printStr;
String stringVal;
if(decVal <0){
printStr = String("-");
decVal = decVal * -1;
}
else {
printStr = String(" ");
}
stringVal = String(decVal, DEC);
if(decVal <10000) { printStr = String(" " + printStr ); }
if(decVal < 1000) { printStr = String(" " + printStr ); }
if(decVal < 100) { printStr = String(" " + printStr ); }
if(decVal < 10) { printStr = String(" " + printStr ); }
printStr = String(printStr + stringVal );
Serial.print(printStr);
} // end of printDec()
[/codesyntax]
