
Schrittmotor am I2C

Es gibt eine große Anzahl von Motoren, aber ich habe mich für folgendes Modell entschieden: 28BJY-48 mit ULN2003 control board.
Die Gründe für diesen Schrittmotor
- Er is billig – ca. 2,50 inkl. Versand
- Es bei vielen Anbietern erhätlich
- hat einen Controller board
- klein aber relativ stark
- funktioniert mit 5V
- einfaches Interface
Ich habe ihn bei eBay im Chip_Partner_Store gekauft (1pcs Stepper Motor+ Driver Board ULN2003 5V 4-phase 5 line)
Hier gibt es weitere Details: Stepper Motor 28BJY-48 Datasheet

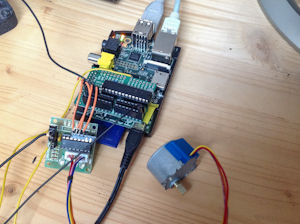
- Raspberry mit Schrittmotor via Slice I/O
Der Motor und das Contoller Board werden mit dem Stecker vebunden.
Die Verbindung zum PI erfolgt über 2 Pins für die Stromversorgung und 4 Pins für die Steuerleitungen.
Ich habe hier den Schrittmotor via MCP23017 verbunden, welches auf dem extension board “Slice of PI/O” sitzt.
Daher muss ich in dieser Lösung den Motor über I2C / smbus ansprechen.
Das Board soll die GPIO PINs schützen.
Python Script – step.py
Das folgende Script habe ich für die Steuerung erstellt.
Es gibt zwei Sequenzen mit 4- und 8 Schritten.
Die Sequenz mit 4 Schritten ist schneller hat aber weniger Kraft.
[codesyntax lang="python"]
#!/usr/bin/python
# A simple Python command line tool to control a stepper motor
# attached to an MCP23017 I2C IO Expander
# By Thomas Hoeser http://thomas.hoeser-medien.de
# GNU GPL V3
import smbus
import sys
import time # for sleep timer
import argparse # analyze command line arguments
bus = smbus.SMBus(1) # smbus.SMBus(1) for revision 2
I2C_address = 0x20 # I2C address of MCP23017
BankA =0x00
BankB =0x01
RegisterB = 0x13 # BankB
RegisterA = 0x12 # BankA
degree_rate = 510.0 / 360.0 # convert degree into steps; 510 steps = 360 degree
# ------------------------------------------------------------------
def usage():
print 'Usage: step.py -h | -d <degrees> [-r -v [level] -n -s -t [time]]'
print "Examples"
print "step.py -d 360 # turn 360 degrees"
print "step.py -d 360 -r # turn 360 degrees into reverse direction"
print "step.py -d 360 -s # turn 360 degrees using 8 step sequence"
print "step.py -d 360 -t 0.01 # turn 360 degrees wit delay of 0.01 seconds"
print "step.py -d 360 -n -v2 # simulate and print debug messages"
# define default settings
verbose_level = 0
simulate_flag = 0
direction_flag = 0
sleep_time = 0.006
# 4 step sequence is faster but the torque is lower
StepCount4 = 4
Seq4 = []
Seq4 = range(0, StepCount4)
Seq4[0] = int('00010001',2)
Seq4[1] = int('00100010',2)
Seq4[2] = int('01000100',2)
Seq4[3] = int('10001000',2)
# 8 step sequence is slower but the torque is higher
StepCount8 = 8
Seq8 = []
Seq8 = range(0, StepCount8)
Seq8[0] = int('00000001',2)
Seq8[1] = int('00000011',2)
Seq8[2] = int('00000010',2)
Seq8[3] = int('00000110',2)
Seq8[4] = int('00000100',2)
Seq8[5] = int('00001100',2)
Seq8[6] = int('00001000',2)
Seq8[7] = int('00001001',2)
# ------------------------------------------------------------------
def gpio_setup():
if verbose_level >0: print "prepare smbus: ", I2C_address , BankA, BankB
bus.write_byte_data(I2C_address,BankA,0x00) # Set all of bank A to outputs
# bus.write_byte_data(I2C_address,BankB,0x00) # Set all of bank B to outputs
return
# ------------------------------------------------------------------
def gpio_read(register):
if simulate_flag ==0:
value = bus.read_byte_data(I2C_address,register)
if verbose_level >3:
print "Read : Address 0x%02x Register 0x%02x / Value 0x%02X = %s" % (I2C_address, register, value,bin(value))
return
# ------------------------------------------------------------------
def gpio_write(register,value):
if verbose_level >2:
print "Set : Address 0x%02x Register 0x%02x / Value 0x%02X = %s" % (I2C_address, register, value,bin(value))
if simulate_flag ==0:
bus.write_byte_data(I2C_address,register,value)
if verbose_level >3: gpio_read(register)
return
# ------------------------------------------------------------------
def step_main(Register,Seg,Stepcount,Cycles,sleep_time):
print "----- %d steps using %s sequence, delay %.3f ----- " % (Cycles,Stepcount,sleep_time)
if direction_flag >0:
if verbose_level >1: print "turn ->"
for cyc in range (0,Cycles):
for value in range (0,Stepcount):
gpio_write(Register,Seg[value])
time.sleep(sleep_time)
else:
if verbose_level >1: print "turn <-"
for cyc in range (0,Cycles):
for value in range (Stepcount-1,-1,-1):
gpio_write(Register,Seg[value])
time.sleep(sleep_time)
return
# ------------------------------------------------------------------
def main():
global verbose_level
global sleep_time
global simulate_flag
global direction_flag
parser = argparse.ArgumentParser(description="write to I2C interface to control stepper motor")
parser.add_argument("-d", "--degree", help="turn [degree]", type=int)
parser.add_argument("-s", "--strong", action='store_const', dest='strong', const='value-to-store',help="use 8 step sequence with strong torque",)
parser.add_argument("-t", "--time", help="sleep [TIME] seconds; default 0.006", type=float)
parser.add_argument("-n", "--nowrite", action='store_const', dest='nowrite', const='value-to-store',help="no write, just simulate",)
parser.add_argument("-r", "--reverse", action='store_const', dest='reverse', const='value-to-store',help="reverse direction",)
parser.add_argument("-v", "--verbose", default=False,
dest='verbose', help="increase output verbosity", type=int)
parser.add_argument('--version', action='version', version='%(prog)s 0.1')
args = parser.parse_args()
if args.verbose: verbose_level = args.verbose
if args.degree:
loops = int(args.degree * degree_rate)
print "turn %d degrees %d steps " % (args.degree,loops)
if args.time:
sleep_time = args.time
if verbose_level >0: print "sleep time ", sleep_time
if args.nowrite:
simulate_flag = 1
if verbose_level >0: print "simulating, no output to device"
if args.reverse:
direction_flag = 1
if verbose_level >0: print "reverse direction"
gpio_setup() # prepare smbus
if args.strong:
if verbose_level >0: print "using Sequence 1"
step_main(RegisterA, Seq8,StepCount8,loops,sleep_time)
else:
if verbose_level >0: print "using Sequence 2"
step_main(RegisterA, Seq4,StepCount4,loops,sleep_time)
gpio_write(RegisterA,0) # set all outputs to 0
sys.exit(0)
else:
print "Error! need to provide cycles, e.g. 360 degrees: -c 510"
usage()
sys.exit(1)
if __name__ == "__main__":
main()
[/codesyntax]
